Introduction
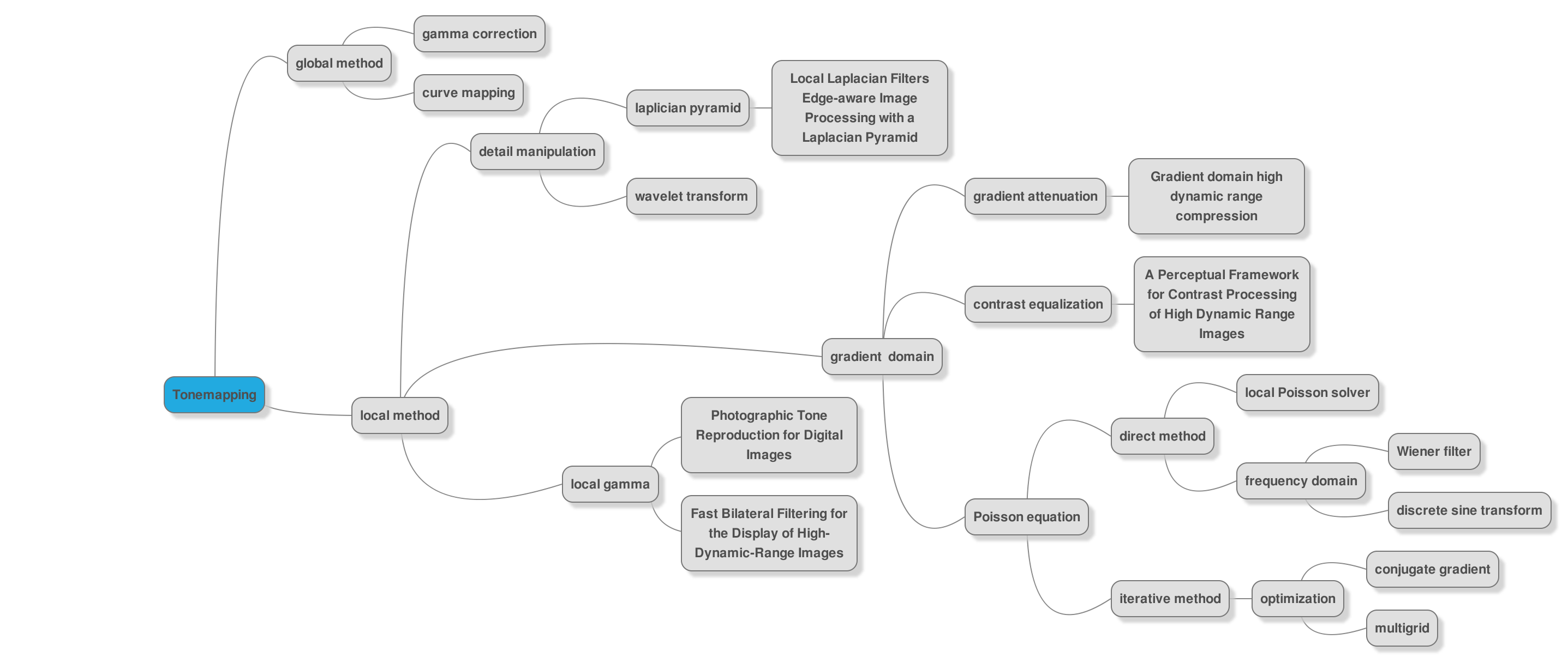
本篇利用了標準的Laplacian pyramid,藉由操作修改residual layer來達到detail enhancement與tone mapping的效果。想當然是halo free;此外的特色是no optimization、no gradient domain manipulation,所以適用實作和加速。上圖則是激動人心的差異!

這邊我實作了一個簡易版的 javascript demo ,速度很慢,不要太期待。
閱讀全文〈Local Laplacian Filtering : Image Detail Enhancement and Tone Mapping〉